Robot Deployment Reliability - SkyDeck Dinner Series: OORB x Berkeley Grad Students
Berkeley grad students: come have dinner with the founders of OORB (UC Berkeley SkyDeck Batch 22).
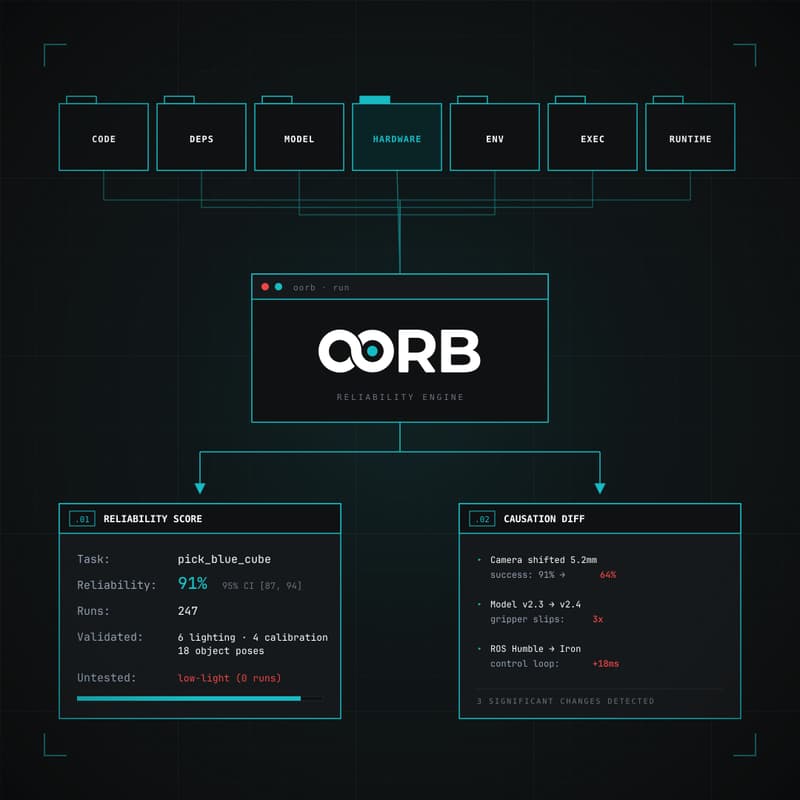
We are building the reliability layer for robot deployments. We capture every robot run, score statistical reliability, and tell robotics teams exactly what changed when a learned policy behaves differently across runs, machines, or environments. We sit on top of teams' existing stacks (ROS, Foxglove, Rerun, sim) and turn deployment from a vibes check into a measurable engineering problem.
If you work on VLAs, RL on real robots, sim-to-real, policy evaluation, or anything between the lab and the field, this is your kind of evening. Bring your own research or open-source work. We would love to compare notes on what holds up when research hits real hardware, what breaks at deployment, and what evaluation methods you have seen actually work.
Small group, conversation runs deep, dinner is on us. Grab a spot below. Learn more at oorb.io.