Bliss Reading Group - July 13
We close out the season with a paper that ties together the themes of this mini-track: if a robot can sense contact and apply the right forces, how does it figure out where to interact in the first place?
Our paper is Coupled Particle Filters for Robust Affordance Estimation (Lowin, Mengers & Brock, 2026) — coming from Oliver Brock's Robotics and Biology Laboratory right here at TU Berlin, and accepted at ICRA 2026.
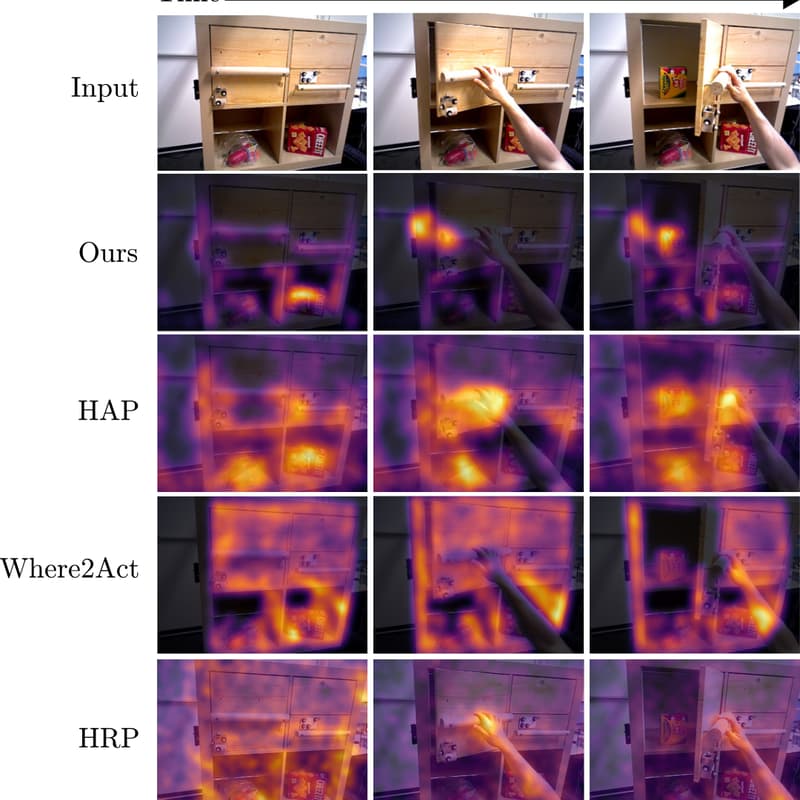
Affordance estimation — determining where on an object a robot can grasp it, and where it can move it — is difficult because visual input is full of ambiguity. The authors propose a neat solution: instead of one monolithic estimator, they use two coupled particle filters, one for "graspable" regions and one for "movable" regions, each encoding its own structural regularities. The key insight is in the coupling: the two filters exchange information bidirectionally, focusing attention on regions where both agree — which is precisely where affordances lie. Evaluated on a real-world dataset, the method outperforms three recent approaches (Where2Act, Hands-as-Probes, and HRP) by large margins, and remains robust under challenging conditions like low lighting.
As a season closer, this paper invites us to zoom out: across three sessions we've seen robots sense contact acoustically, learn force-sensitive manipulation policies, and now estimate where interaction is possible in the first place. How do these pieces fit together in a complete manipulation pipeline? Is coupling simple, interpretable estimators a more promising path than end-to-end learned systems? And what role should physical priors play versus letting the data speak?
Join us for a lively and interesting discussion!