CORE - Control Stack I
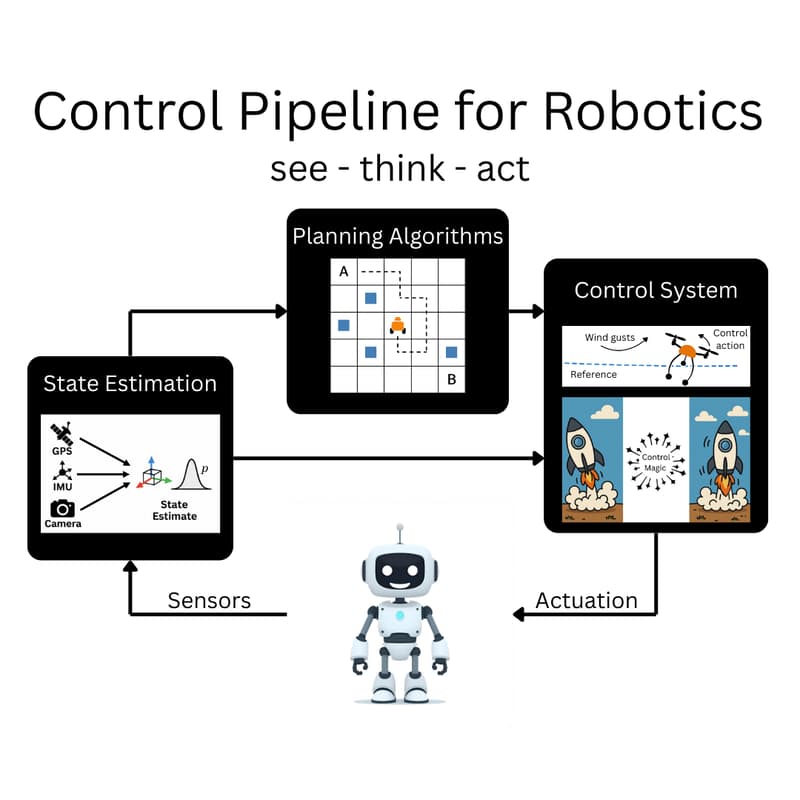
This first session of the Control Stack Workshop series focuses on model-based control under the assumption of perfect state knowledge and available reference trajectories. We’ll begin by setting up the general control problem and then explore different controllers to stabilize a given system, examining their limits and adapting them or changing the method to regain stability.
The workshop will cover PID control (with basic system analysis concepts) and LQR, before refreshing optimization basics as they are required for Model Predictive Control (MPC). Both linear and nonlinear MPC will be discussed with a focus on practical implementation.
After each method introduction, you’ll implement and test the controller yourself. You’ll build intuition for the strengths and weaknesses of classic and modern control methods through hands-on experience. If time allows, we will also touch on advanced MPC concepts.
The workshop is intended for students with little or no prior control experience. Bring your laptop. All required files will be provided before the workshop.