Bliss Reading Group - June 29
With this session we begin a new 3-part mini-track on Robot Perception for Physical Interaction, led by Michael Samjatin. Moving from world models to the physical world, we now explore how robots can sense and reason about contact — through sound, force, and visual affordances.
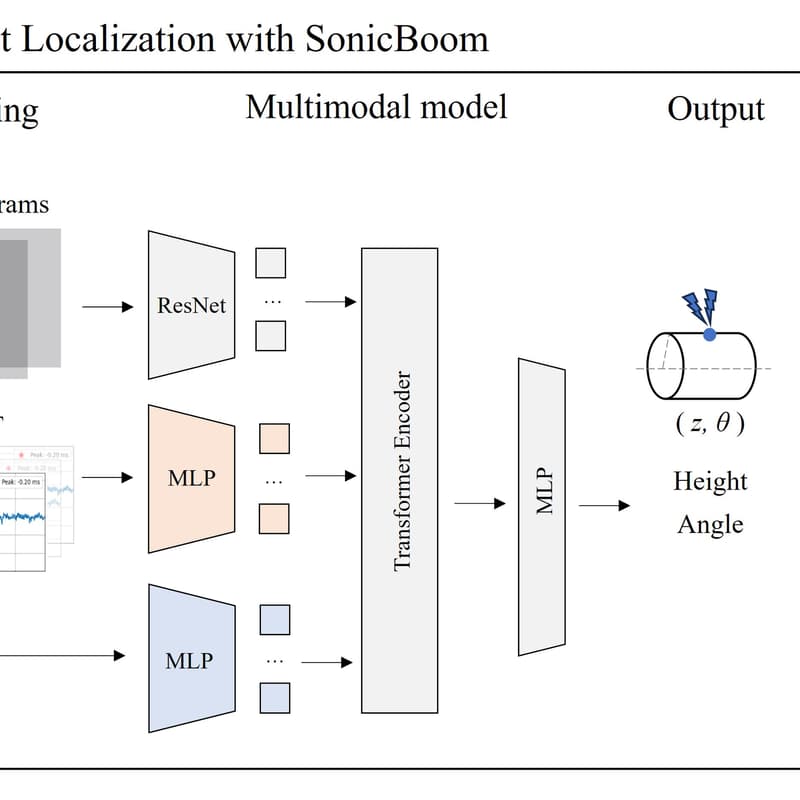
Our first paper is SonicBoom: Contact Localization Using Array of Microphones (Lee et al., 2024).
In cluttered environments where vision is heavily occluded — think a robot reaching through dense foliage to find branches — touch becomes essential. SonicBoom takes an unusual approach to the problem: instead of conventional tactile sensors, it uses an array of six piezoelectric contact microphones mounted on a robot's end-effector. By learning from 18,000 autonomously collected interaction–sound pairs, the system maps acoustic signals to collision locations, achieving localization errors of just 0.43 cm in-distribution and a still-useful 2.22 cm on novel objects and contact conditions. The authors demonstrate this in a practical setting: haptic mapping of occluded branches in a mock agricultural canopy.
SonicBoom raises some intriguing questions for discussion: What are the trade-offs of acoustic sensing versus more established tactile approaches? How well would this transfer to materials and geometries far from the training set? And what does it tell us about the richness of information hidden in contact sounds that we typically ignore?
Join us for a lively and interesting discussion!